

无感无刷电机驱动原理详解
无感无刷电机(Sensorless Brushless DC Motor, SBLDC)作为一种新兴的电机技术,因其高效、可靠和低成本的特点,广泛应用于各种领域。与传统的有感无刷电机(Sensor-Based BLDC Motor)相比,无感无刷电机在控制方法上有所不同,其驱动原理也更为复杂。X-TEAM云台电机将详细探讨无感无刷电机的驱动原理,帮助读者更好地理解其工作机制及应用优势。
一、无感无刷电机概述
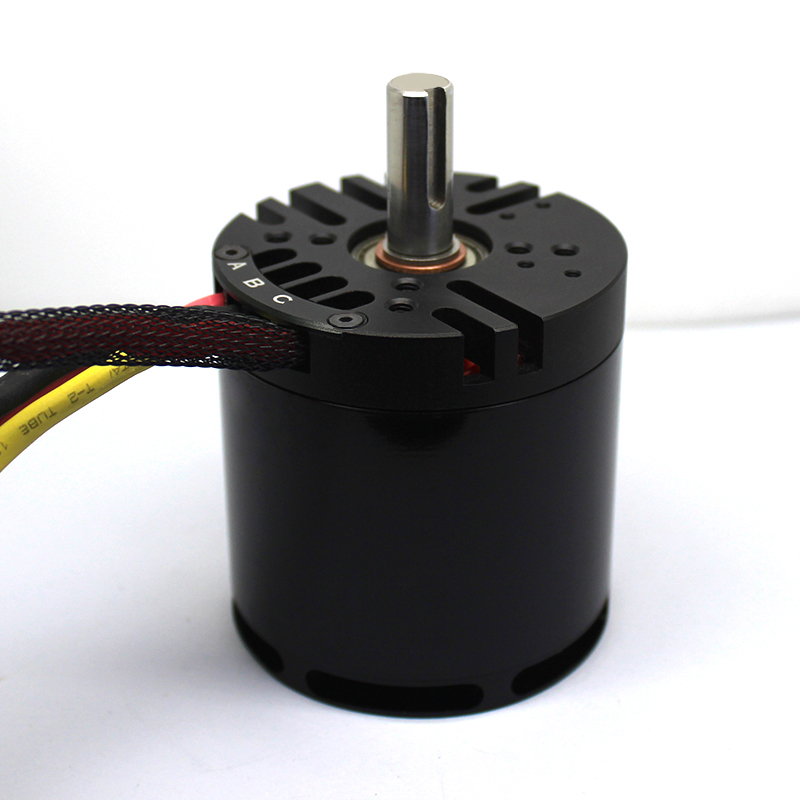
无感无刷电机是一种不需要传感器来检测转子位置的无刷直流电机。传统的无刷电机通常需要霍尔传感器或其他位置传感器来确定转子的位置,从而实现精确的电子换向。无感无刷电机通过软件算法和电流波形分析来实现这一目标,从而省去了传感器的需求,降低了系统的复杂性和成本。
二、无感无刷电机的驱动原理
1. 基本原理
无感无刷电机的基本驱动原理基于对电机线圈电流的测量和处理,以估算转子的位置。具体来说,它采用以下几种方法来实现无感控制:
- 电流反电动势(Back EMF)检测:通过分析电机线圈中的电流和反电动势波形来估算转子位置。
- 零电流点检测:通过检测电机每个相位的零电流点来推算转子角度。
- 状态观测器算法:使用先进的数学算法(如卡尔曼滤波器或扩展卡尔曼滤波器)来估算转子的状态。
2. 驱动方法
- 电流控制法:通过控制电机中的电流来间接推算转子位置。这种方法依赖于电流的变化规律和电动势波形,可以有效估算转子的实时位置。
- 估算算法:无感无刷电机通常采用基于电机模型的状态估算算法(如扩展卡尔曼滤波器)来实时估算转子位置和速度。这些算法使用电机的数学模型和测量数据进行计算,并对估算结果进行修正。
3. 换向控制
在无感无刷电机中,电子换向是关键步骤。与有感电机不同,无感电机没有位置传感器,因此换向控制主要依赖于电流波形和估算的转子位置。主要的控制方法包括:
- 基于反电动势的换向:通过检测电动势的变化来判断换向时机。这种方法依赖于电机的反电动势波形来推算转子位置。
- 状态估算换向:利用状态观测器算法对转子位置进行估算,并根据估算结果进行换向控制。
三、无感无刷电机的优势与挑战
1. 优势
- 降低成本:由于省去了位置传感器,无感无刷电机的整体成本更低。
- 减少故障率:无传感器设计降低了机械故障的可能性,提升了系统的可靠性。
- 适用范围广:适用于各种要求高可靠性和低维护的场合,如家电、电动车等。
2. 挑战
- 控制复杂性:无感控制需要复杂的算法和精确的估算,这对控制系统的计算能力和算法设计提出了高要求。
- 启动性能:在低速或启动时,,由于缺乏精确的转子位置反馈,可能会影响电机的启动性能和稳定性。
- 温度影响:电机的温度变化可能影响电流波形和反电动势,从而影响转子位置的估算精度。
四、应用实例
无感无刷电机在许多应用场景中表现出色,包括:
- 家用电器:如洗衣机、吸尘器等,因其高效、低噪音和低维护特性而被广泛应用。
- 电动车:如电动滑板车、电动自行车等,需要高效驱动和可靠性。
- 无人机:要求高功率密度和低重量的电机,无感无刷电机可以提供稳定的飞行性能。
结论
无感无刷电机作为一种先进的电机技术,通过复杂的算法和电流波形分析实现了对转子位置的准确估算。虽然在控制复杂性和启动性能上存在一定挑战,但其低成本、低维护和高可靠性使其在许多领域得到了广泛应用。随着技术的不断发展和控制算法的优化,无感无刷电机的应用前景将更加广阔。



如果您想了解更多 无感无刷电机驱动原理详解 等相关信息,可咨询客服或留言
©2022 广东历鼎龙动力科技有限公司 版权所有. info@x-teamrc.com 网站备案号:粤ICP备18028543号-8